Down low, too slow: How your brain learns optimal hand control
High-fives can be embarrassing. You know the kind—where you decide you’re fully committed, and with unwarranted force and enthusiasm, you shoot your arm out only to hear the stifled thud of your pinky colliding with your high-five partner’s ear. Luckily for us, humans are equipped with a highly nuanced motor system so that, 9 times out of 10, you can land your high-fives with a bang!
Let’s consider how the brain prepares your body for a high-five. Typically, you begin a high-five with a simple hand raise movement. To generate motion in your arm, the area of your brain responsible for movement—the motor cortex—produces a specific movement instruction—the motor command—which is then passed to the muscles of your arm to elicit the hand-raising action. An identical copy of the motor command is sent to another area of the brain to predict what the action will look like once it has been executed. To land a high-five then, the motor command copy is used to predict that your arm will move up over your head. The prediction is compared with feedback regarding your actual executed movement (i.e., your hand raise); if the two do not match, a prediction error occurs. The prediction error alerts your brain that something went wrong with your movement. This information is then used to optimize future motor commands, leading to more accurate subsequent movements (Wolpert, Diedrichsen, and Flanagan, 2011).
Motor commands that inform our movements are often accompanied by other motor commands that elicit activity in complementary muscle groups. This idea is best explained by a crude example. Let’s say your phone is on auto-rotate and you can’t quite read that email from Susan. So, you decide to tilt your head to the right, bringing your right ear closer to your right shoulder (because it’s obviously too much work to find the auto-rotate button on your phone—ain’t nobody got that kind of time). Your head tilt is achieved by a feedforward motor command inducing muscle contraction on the right side of your neck. Muscles on the opposite side (i.e., the left side) of your neck simultaneously stretch to compensate for your altered body position. A reciprocal muscle contraction, called a stretch reflex, in your left neck muscle occurs in response to the muscle stretching. The stretch reflex is a product of a separate feedback motor command. Just like how the force of gravity is paired with an opposite “normal” force, that keeps you from falling into the core of the Earth, you can think of feedforward and feedback motor commands as opposite pairs of commands that keep your movements controlled.
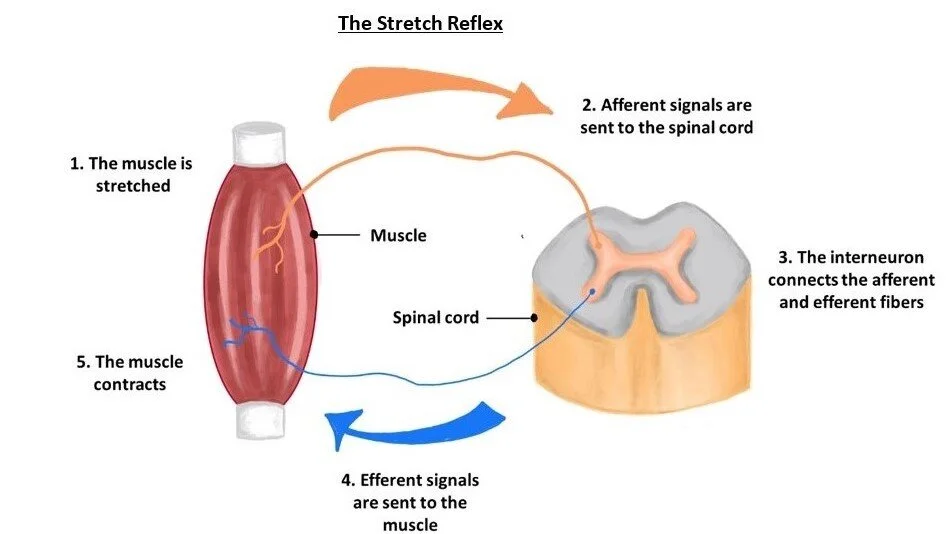
Figure 1. The stretch reflex. Drawing by Rubina Malik, adapted from Joshya (ShutterShock).
As mentioned previously, prediction-errors are used by the brain to optimize movements. For each motor command that informs a particular movement, there is a corresponding prediction-error calculation (you can think of motor commands and prediction-error calculations as occurring in 1:1 ratios). It is well-established that when prediction-errors occur, feedforward motor commands are altered to improve the precision and accuracy of subsequent movements. However, until recently, the question of whether feedback motor commands for the same movement are also altered by feedforward prediction errors remained a mystery. This is like asking whether increasing the force of gravity acting on you, by holding a heavy box full of books, for example, would cause a matching increase in the normal force. Cluff and Scott (2013) explored this question by suddenly perturbing participants’ arms while they made reaching movements. In a high-five scenario, this might look like someone pushing your arm off course while you’re going for it (how rude!). As a result, participants had to change the trajectory of their reaching movements so that they could successfully reach a target. These changes in reaching movements are informed by modifications in feedforward motor commands, in response to prediction-errors caused by the perturbations. Results of the study revealed that, just as the normal force adapts to changes in gravity, the stretch reflex, informed by feedback motor commands, were indeed altered to match changes in feedforward commands. Interestingly, this means that prediction-errors that directly influence feedforward motor commands, somehow also influence complimentary feedback motor commands.
In Cluff and Scott’s (2013) study, prediction-errors were caused by pushing the arm off its trajectory while the participant reached for a target. In this case, each reaching movement was compromised by an external force, but the arm’s natural dynamics (i.e., how the hand, elbow, and shoulder work together to reach) was maintained. Maeda and colleagues (2018) were interested in exploring how changes in natural arm dynamics altered feedforward and feedback motor commands. They wondered whether, like in Cluff and Scott’s (2013) study, feedback motor commands would synchronously optimize in response to a feedforward prediction-error. As such, the researchers used a similar reaching paradigm. The key difference in Maeda and colleagues’ (2018) experiment was the manipulation of the arm’s natural reaching tendency. If the opportunity is present, humans tend to unconsciously recruit muscles in the shoulder to aid in a reaching action. However, when you take away the mobility of the shoulder, our bodies will find other muscle groups to activate to make the same reaching action. Making use of this observation, the researchers had participants make reaching actions that could be achieved exclusively by elbow movements. For parts of the experiment, participants were allowed to use shoulder movements to aid in reaching. For other parts of the experiment, participants’ shoulders were “locked” into place, restricting shoulder movement in the reaching task. Reflecting on our high-five example, this part of the experiment is akin to trying to land a high-five (and I’m talking super high up in the air kind of high) when you’re wearing a shoulder-restricting coat. The study revealed two key findings: 1) shoulder restriction altered feedforward motor commands for the arm reaching movement, which manifested as decreased shoulder muscle activity, and 2) shoulder restriction synchronously altered feedback motor commands, which manifested as decreased stretch reflex activity in the shoulder muscle.
With that, Maeda et al. (2018) provided the first evidence for prediction-error induced adaptation, of feedforward and feedback motor commands, in response to altered arm dynamics. So, the next time you slip-up on a high-five, you might find that a (wildly) strong wind blew your arm too far, or perhaps your upward reach was constrained by your way-too-heavy backpack. Either way, don’t sweat it. Try again, and again, and again…and before too long, dignity will be yours.
Original Article:
Maeda, R.S., Cluff, T., Gribble, P.L., and Pruszynski, J.A. (2018). Feedforward and feedback control share an internal model of the arm’s dynamics. The Journal of Neuroscience, 38(49), 10505–10514.
References:
Cluff, T., Scott, S.H. (2013). Rapid feedback responses correlate with reach adaptation and properties of novel upper limb loads. The Journal of Neuroscience, 33, 15903–15914.
Wolpert, D.M., Diedrichsen. J., Flanagan, J.R. (2011). Principles of sensorimotor learning. Nature Reviews Neuroscience, 12, 739–751.